

Summary
私は水中ロボットに10年以上影響を受けており、その始まりは水中ロボットコンテストへの参加でした。
そして現在はロボットに搭載するソフトウェアからチーム全体のマネジメントまで幅広く対応できるようになりました。
私の興味がある分野はリサーチ、開発、モーションコントロールアルゴリズムの組み込みです。
そしてこれまで培ってきた多様な専門知識を、セオリーと実際の動きの距離を効率的に縮めながら海洋研究や水産業の課題解決に取り組める水中ロボットの開発に使っていきたいです。
大学では何を学んでいましたか?
2013年に物理学修士と同様の学位を取得し、物理学の様々な分野(運動学、個体物理学)だけでなく線形代数学やテンソル微積分にも精通しています。
その知識が現在従事している水中ロボットのモーションコントロールに関してのアルゴリズム研究に役立っています。
そして2021年にFEB RAS海洋技術問題研究所での運動制御分野の研究に基づき、「水中車両の過作動推進システムのためのエネルギー効率に優れた制御方法の開発」と題する論文で、情報学とコンピュータ技術の大学院学位を取得しました。
SOLASTERに入る前はどんなことをしていましたか?
2014〜2019年
極東連邦大学で学生たちとチームを組んで低レベルスラスターコントロールの研究をし、様々な遠隔自動水中ロボットのコンテストに出場していました。
2016〜2023年
FEB RAS海洋技術問題研究所でもリサーチャーとして勤務し、AUV制御の新たな方法を研究していました。
またAUVやROVの設計と実装を担当し、IMUドライバやスラスタ制御ドライバといった組み込みソフトウェアの経験も積みました。
SOLASTERでは現在どんなことをしていますか?

水中ドローン”SOLASTER”のシニアプログラマーとして働き、タスクのリストや作業計画も作成しています。
また、ROS2インフラストラクチャ内の車両制御とナビゲーションのコアソフトウェアモジュール、RTSPストリーミング経由のZED2iカメラ用画像取得モジュール、QtフレームワークとQMLウィジェットを使用した車両制御用GUIも設計・実装しました。
日本での生活はどうですか?

私は日本に来てまだ5ヶ月ほどしか経っていないですが、お店のサービスレベルやAmazonなどオンラインで何でも早く丁寧に届くところはかなり好印象で、仕事を進めていく上で非常に助かっています。
一方、イレギュラーなモノやコトがあると解決まで非常に時間がかかってしまいますね。
私は千葉県の郊外に住んでいますが、とても平和で何でも近くにあり快適に暮らしています。
最近自転車を購入してよくサイクリングしていて、道路でのサイクリングが安全でない私の国よりずっと便利です。
水中ドローンの可能性は今後どうなっていくと思いますか?
潜水艇は現在、海底の石油・ガス生産ステーションやオフショア・ファームの整備、水圧構造の検査、その後の幹線敷設のための海底調査などに積極的に使われています。私は、潜水艇の役割は時間の経過とともに増すばかりだと思っています。
それに海底には何千トンもの鉱物やミネラルがあり、水中ドローンが適切に開発されれば経済的に採掘が可能になるでしょう。
私たちの水中ドローンを宣伝してください!
私たちの水中ドローンはユニークなデザインと機能性を持っています。様々な機器を設置できる能力と、軽量・コンパクトさを兼ね備えています。
最先端のモーションコントロールシステムを搭載し、どのような空間姿勢でも正確に安定させることができ、底生海洋養殖の定量的・定性的評価のためのユニークな機能を提供します。
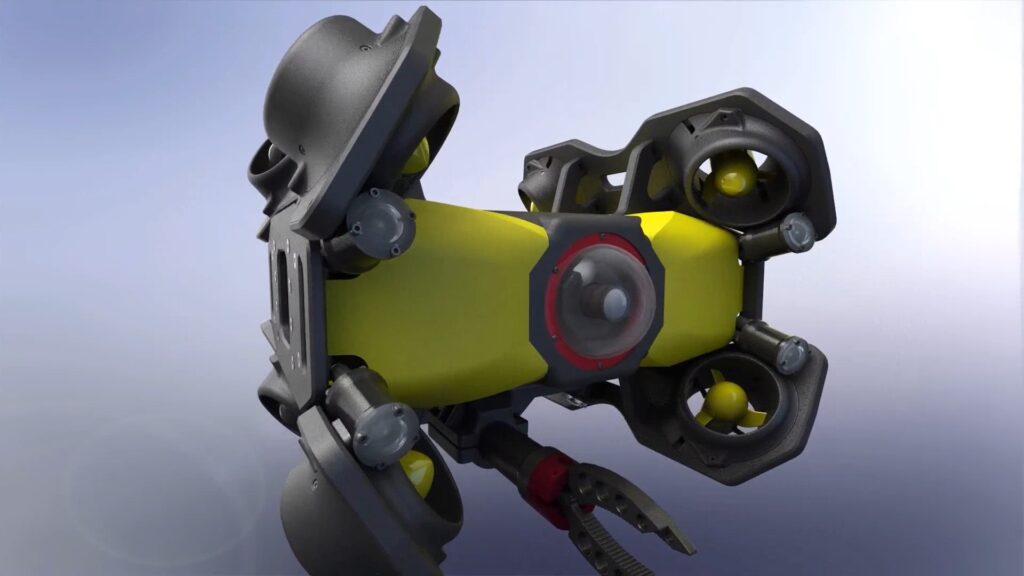
弊社の水中ドローン「Solaster ROV」は、高精度な映像や測定データを提供することができます。海上でのマッピング機能も備わっており、海洋に関する調査や観察を行う際には、ぜひ弊社の水中ドローンをご活用ください。